
 Räumung
Räumung Räumung
Räumung Sondierung
Sondierung Sondierung
Sondierung Sondierung auf Flüssen, Seen und in Häfen
Sondierung auf Flüssen, Seen und in Häfen Marine
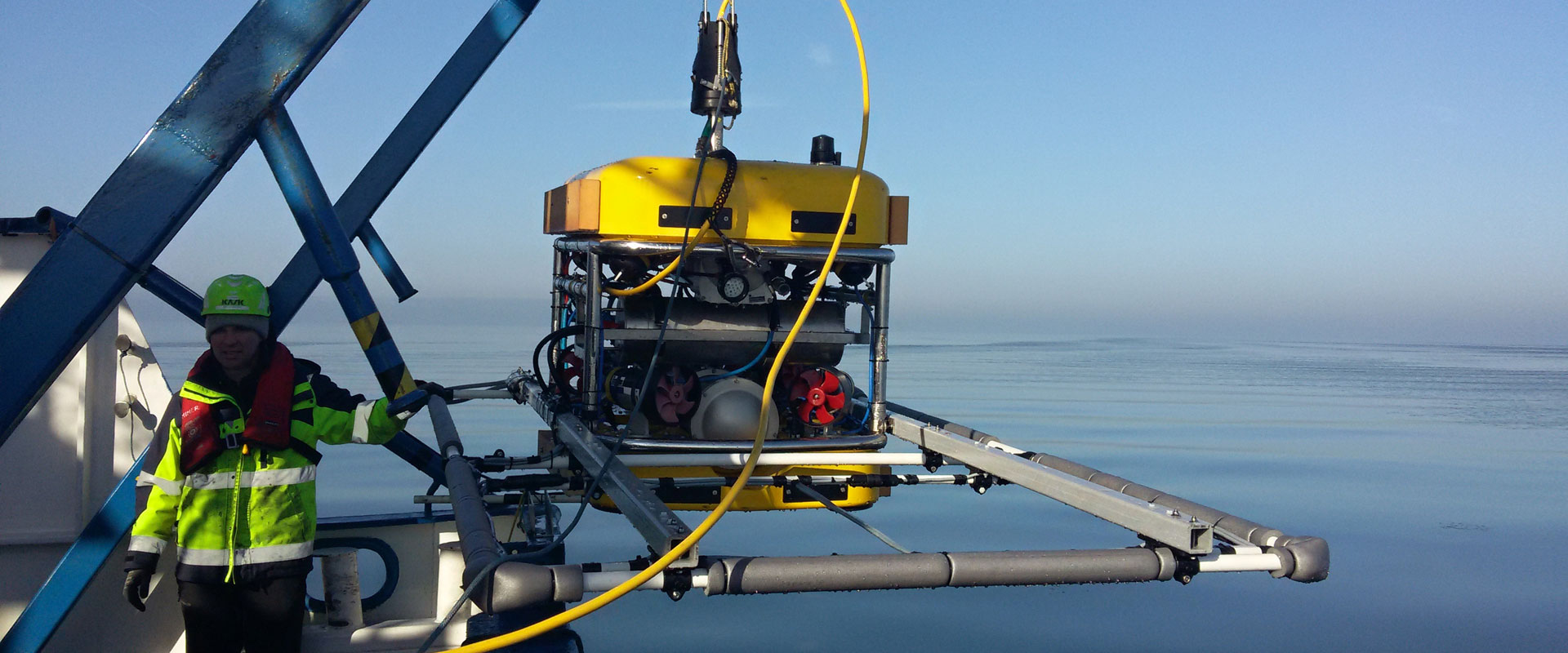
Marine Kampfmittelsondierung mit Drohne
Kampfmittelsondierung mit Drohne




-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
-
 Bildbeschreibung
Bildbeschreibung
NEUE STELLENANGEBOTE
Aktuell suchen wir:
Feuerwerker Land (m/w/d)
Feuerwerker Offshore (m/w/d)
Geophysiker / Geophysikerin in der Landvermessung (m/w/d)
SAFETY FIRST
SEATERRA HAD NO ACCIDENTS AND NO MAJOR INCIDENTS ON THEIR OFFSHORE PROJECTS.

Kampfmittelräumung Offshore
SeaTerra setzt unterschiedliche Methoden ein, um Objekte zu orten, frei zu legen und zu identifizieren. Umfangreiche Erfahrung im Umgang mit Unterwasser-Munition insbesondere dem professionellen Sprengen von Großmunition zählen zu unserem Dienstleistungsspektrum. Im Rahmen zahlreicher Offshore-Projekte konnten wir durch die professionelle Abwicklung der Kampfmittelräumung ...

Kampfmittelräuumung Land
Vom Kampfmittelverdacht bis zur Bestätigung der Kampfmittelfreiheit begleitet Sie SeaTerra als verlässlicher Partner bei der Durchführung Ihres Bauprojektes. Baubegleitend oder im Vorfeld Ihrer geplanten Maßnahme gehört das Sondieren, Freilegen von Bombenblindgängern, Munition und anderen Kampfmitteln zum Kernarbeitsbereich unserer erfahrenen Feuerwerker ...

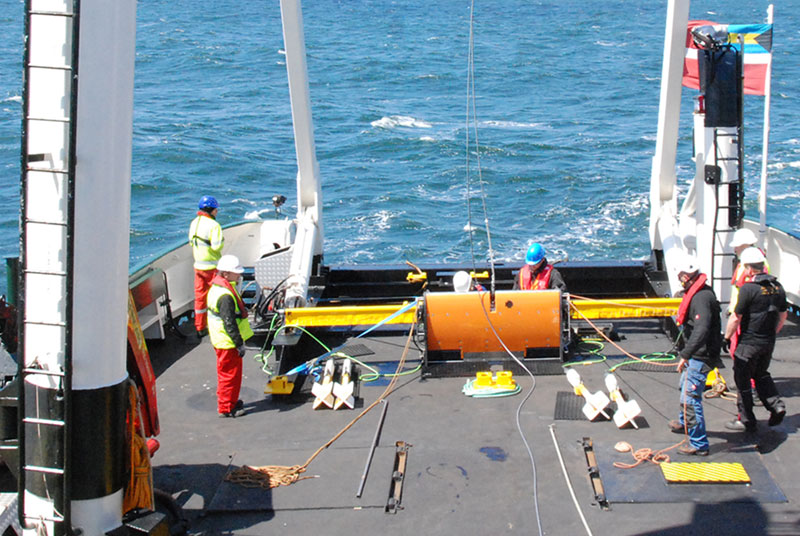
Kampfmittelsondierung Offshore
Für die Datenanalyse und -interpretation verwendet SeaTerra eigene, speziell für Kampfmittel entwickelte, Inversionsalgorithmen, um in einer 2D- und 3D-Analyse die bestmöglichen Objektparameter wie Größe, Tiefe und Position zu ermitteln. Die Qualität der Dateninterpretation durch eine nach §7 zugelassene Kampfmittelräumung, mit jahrelanger Erfahrung im Bereich der Kampfmittelsondierung ...

Kampfmittelsondierung Land
Die SeaTerra GmbH verfügt über jahrelange Erfahrung im Bereich der Kampfmittel- Sondierung, -Räumung und -Sprengung. Zu Wasser und zu Land. Damit bieten wir Ihnen vor allem eines: Professionalität und Sicherheit für Ihr Projekt. Um den projektspezifischen Anforderungen einer sicheren Sondierung und Bergung an Land gerecht zu werden, verwendet SeaTerra moderne und hochpräzise Technologien ...

Kampfmittelsondierung auf Flüssen, Seen und in Häfen
Mit modernsten Technologien wird SeaTerra den anspruchsvollen Anforderungen einer sicheren Kampfmittelsondierung in Flüssen, Seen, Häfen und im küstennahen Bereich gerecht. Die besonderen Herausforderungen fließender Gewässer, stark befahrener Hafenbereiche oder tidenabhängiger Küstenbereiche sind uns besten bekannt.
Marine Geophysik
SeaTerra ein breites Spektrum mariner geophysikalischer Vermessung an. Die SeaTerra-Schiffe mit einbezogen, bieten wir ein umfangreiches Dienstleistungsprogramm zur Erkundung des Meeresgrundes an. Dieses umfasst die komplette Bandbreite von Vorerkundung bis zu detaillierten Untersuchungen. Der SeaTerra-Gerätepool umfasst eine große ...